命令轴组从工具中心点的目前位置开始进行螺旋插补运动。终点和辅助点被定义在相对于起点的指定座标系统中(终点和辅助点的定义取决于所选的 CircMode 模式)。执行命令时,指定的相对距离将被加到目前的命令位置。
命名空间:IntervalZero.KINGSTAR.Local.Api
组合: IntervalZero.KINGSTAR.Local.Api (于 IntervalZero.KINGSTAR.Local.dll) 版本:4.4.0.0
语法
public KsCommandStatus MoveHelicalAdditive(
int Index,
McCircMode CircMode,
double[] AuxPoint,
double[] EndPoint,
McCircPathChoice PathChoice,
double Depth,
double Pitch,
double Velocity,
double Acceleration,
double Deceleration,
double Jerk,
McCoordSystem CoordSystem,
McBufferMode BufferMode,
McTransitionMode TransitionMode,
double[] TransitionParameter
)Public Function MoveHelicalAdditive(
Index As Integer,
CircMode As McCircMode,
AuxPoint As Double(),
EndPoint As Double(),
PathChoice As McCircPathChoice,
Depth As Double,
Pitch As Double,
Velocity As Double,
Acceleration As Double,
Deceleration As Double,
Jerk As Double,
CoordSystem As McCoordSystem,
BufferMode As McBufferMode,
TransitionMode As McTransitionMode,
TransitionParameter As Double()
) As KsCommandStatus参数
Index [in]
型别:int
轴组的索引。索引以 0 为起始。最多可有 32 个轴组。
CircMode [in]
型别:McCircMode
指定输入讯号 AuxPoint 的定义。
AuxPoint [in]
型别:double[]
指定座标系统中各维度的位置阵列,最大为 64。这些位置是相对于起点的位置所定义的。
EndPoint [in]
型别:double[]
指定座标系统中各维度的位置阵列,最大为 64。这些位置是相对于起点的位置所定义的。
PathChoice [in]
路径的选择。
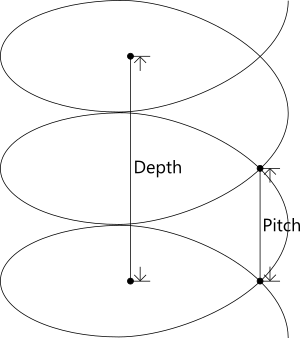
Depth [in]
型别:double
螺旋高度。
Pitch [in]
型别:double
一个完整螺旋圈的高度。
Velocity [in]
型别:double
在定义路径的座标系统中,该路径的最大速度;永远为正值,非必要到达。[单位/秒]
Acceleration [in]
型别:double
最大加速度;永远为正值,非必要到达。单位取决于 McProfileType。[单位/秒2] 或 [秒]
Deceleration [in]
型别:double
最大减速度;永远为正值,非必要到达。单位取决于 McProfileType。[单位/秒2] 或 [秒]
Jerk [in]
型别:double
最大加加速度;永远为正值,非必要到达。单位取决于 McProfileType。[单位/秒3] 或 [秒]
CoordSystem [in]
座标系统。
BufferMode [in]
型别:McBufferMode
定义方法的时间顺序。
TransitionMode [in]
插入一个转换曲线。
TransitionParameter [in]
型别:double[]
转换模式的附加参数,若将 TransitionMode 设为 mcNone,则此参数无效。
回传值
回传 KsCommandStatus 类别。
备注
- 更多关于绝对、相对与附加的运作方式请见:运动。
- 更多关于轴如何在 McCircMode 模式中移动的资讯请见:McCircMode。
- Depth 与 Pitch 参数如下图所示:
- 插补的速度为切线速度。
| 顺时钟路径 | 逆时钟路径 |
|---|---|
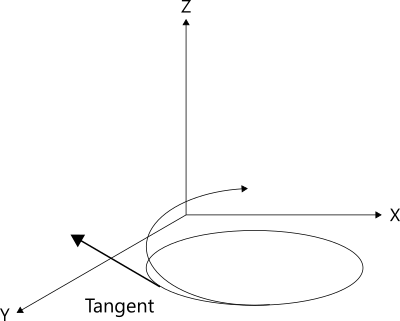
|
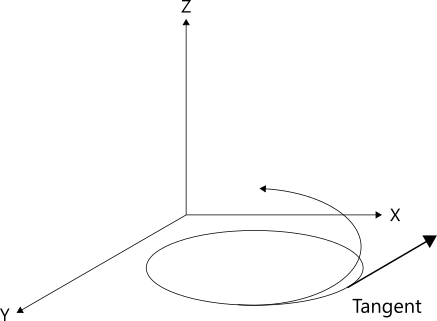
|
范例
N/A参见